{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Precise Orientation: The BNO055 is designed for precise orientation measurements and provides Euler angles (roll, pitch, and yaw) with three decimal places.
Integrated Sensor Fusion: The sensor fusion algorithm is implemented on the chip, reducing the complexity of fusion calculations on the microcontroller.
High Accuracy: The BNO055 is known for its high accuracy and low drift, making it suitable for applications that require precise orientation data.
Calibration: It includes an automatic calibration feature for both gyroscope and magnetometer, simplifying the calibration process.
Arduino Compatibility: There are Arduino libraries available for the BNO055, making it easy to use with Arduino projects.
While it doesn't have a built-in magnetometer, you can often integrate a
separate magnetometer module (like the HMC5883L or its successor, the QMC5883L) for better orientation accuracy
is a three-axis digital compass module designed for low-field magnetic sensing with
a digital interface for applications such as compassing and magnetometry. It is
commonly used in electronic projects and devices where measuring the Earth's magnetic field is necessary.
is designed to provide accurate readings of the Earth's magnetic field
it requires sensor fusion techniques. The ICM-20948 is a 9-axis sensor,
which means it includes a 3-axis accelerometer, a 3-axis gyroscope,
and a 3-axis magnetometer. By combining the data from these sensors and
applying sensor fusion algorithms, you can obtain accurate orientation
information, including roll, pitch, and yaw angles.
- CDM -> diskpart -> list disk
Solution #1: Restore Deleted Files from USB Drive Using CMD
1. Connect the USB flash drive to your computer.
2. Open the Start menu, type "cmd", and hit Enter on your keyboard.
3. Type "chkdsk X: /f" in the Command Prompt window and hit Enter. Just make sure to replace “X” with the letter assigned to your USB flash drive.recover deleted files from flash drive without software
4. Finally, type "ATTRIB -H -R -S /S /D X:*.*" and hit the Enter key (Again, replace “X” with the drive letter of the USB drive).recover deleted files from flash drive
5. Wait for the process to be completed.
Solution #2: Use the Restore Previous Versions Feature
1. Connect the USB flash drive to your computer.
2. Open the Start menu, type "This pc", and hit Enter on your keyboard.
3. Right-click on your USB flash drive and select "Properties".
4. Go to the "Previous Versions" tab and look at the list of available recovery options.
5. Select a previous version and click "Restore".
Solution #3: Use a Data Recovery Software
Today we will be using the latest version of Disk Drill to recover data. It’s is one of the most popular and well-established data recovery software on the market.
Steps to recover deleted files from a USB flash drive:
1. Go to the following address and download Disk Drill: https://www.cleverfiles.com/
2. With your pen drive connected, launch Disk Drill
3. Click the "Search for lost data" button next to it.
4. Select which files you want Disk Drill to recover and click the "Recover" button.
8MHZ - 8,000,000 cycles per second
int 4bytes -2`147`483`648 to 2`147`483`648 or uint32_t 4 bytes [0-4294967295]
EEPROM write cycle typically takes 3.3 ms to complete
| I/O | FLASH | RAM | BAND | |
|---|---|---|---|---|
| CC1301 | 10-30 | 32-128 | 16/20 | Sub 1GHz, Wi-Fi |
| CC1350 | 10-33 | 128KB | 20KB | Sub-1GHz, Wi-Fi, BLE |
| CC1352R | 28 | 352KB | 80KB | Sub-1GHz AND 2.4GHz - DUAL BAND |
| CC1352P | 26 | 352KB | 80KB | Sub-1GHz AND 2.4GHz - integrated amplifier |
| CC2640R2 | 10-31 | 128KB | 20KB | BLE 5, 2.4GHz |
| CC110L | transmit | <1.5e | 300-928MHz | |
| CC115L | transmit | <1e | 300-928MHz | |
| CC1150 | transmit | <2e | 300-900MHz | |
| CC1200 | transceiv | <2.5e | 136-960MHz | |
| CC1175 | trannmit | <2.5e | 136-960MHz | - 10pcs ordere - 25eur |
***CC1310 vs CC1350: Can be replacable each other. The main advantage of the CC1352 over the CC1350 is the increased memory. With the increased memory you can run multiple stacks (TI15.4 and BLE). CC1350 can only run one stack at a time or one full stack and partially another for example, you can run the full TI 15.4 Stack with limited BLE functionality (only beaconing ad not connections)
I/O FREQ FLASH EEPORM RAM PWM USARTS
AVR128DA32 1-24 128KB 512B 16KB 3 has WatchDogTimer
Atmega 4808 27 1-20 48KB 256B 6KB 9 3 1.5
Atmega 4809 41 1-20 48KB 256B 6KB 11 4 1.5
Atmega 328p 23 1-20 32KB 1KB 2KB 6 1 1.5EUR
Atmega 32U4 26 8/16 32KB 1KB 2.5 5? 1
Atmega 1281 54 8/16 128KB 4KB 8KB 6 2 6EUR
Atmega 2561 54 8/16 256KB 4KB 8KB 6 2
Atmega 1280 86 8/16 128KB 4KB 8KB 12 4
Atmega 2560 86 8/16 256KB 4KB 8KB 12 4
Atxmega256a3u 64p 32 256 4KB 16KB 22 7 8eur Allard QuadAnt taimeris
STM32F103x8 32 8-78 64KB --- 20KB 13 3 Have sample Board
SAMD21 48MHz 256KB NO 32KB 12
nRF52832
- 4.3V - 100
- 2.7 - 101
- 1.8 - 110
- disabled -111
- MEgaCoreX - https://github.com/MCUdude/MegaCoreX
- Brownout detection or BOD for short lets the microcontroller sense the input voltage and shut down if the voltage goes below the brownout setting. Below is a table that shows the available BOD options:
4.3 V 4.0 V 3.7 V 3.3 V 2.9 V 2.6 V (default option) 2.1 V 1.8 V Disabled
32-bit ARM Cortex-M0 up to 128 kB flash; upto 12 kB SRAM 4 kB EEPROM USB device USART
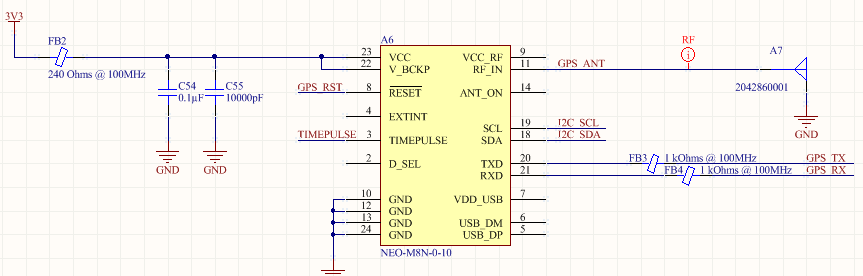
A ferrite bead is a passive device that filters high frequency noise energy
over a broad frequency range. It becomes resistive over its intended frequency
range and dissipates the noise energy in the form of heat. ... This forms
a low-pass filter network, further reducing the high frequency power supply noise.
"32-bit CPU"
char 1byte -128 to 127
short 2bytes -32`768 to 32`768
int 4bytes -2`147`483`648 to 2`147`483`648
long 4bytes -2`147`483`648 to 2`147`483`648
long long 8bytes -9`223`327`036`854`775`807 to 9`223`327`036`854`775`807
float 4bytes 3.4E+/--38
double 8bytes 1.7E+/--308
long double 16bytes
uint8_t 1 byte [0-255]
uint16_t 2 bytes [0-65535]
uint32_t 4 bytes [0-4294967295]
uint64_t 8 bytes [0-18446744073709551615]
== (equal to)
!= (not equal to)
< (less than)
> (greater than)
<= (less than or equal to)
>= (greater than or equal to)
! (logical not)
&& (logical and)
|| (logical or)
% (remainder)
* (multiplication)
+ (addition)
- (subtraction)
/ (division)
= (assignment operator)
y += x; y = y + x;
x -= 5; x = x - 5;
x /= y; x = x / y;
&= (compound bitwise and)
*= (compound multiplication)
++ (increment)
+= (compound addition)
-- (decrement)
-= (compound subtraction)
/= (compound division)
^= (compound bitwise xor)
|= (compound bitwise or)
array_1[] = array_2[] // tikai pieliidzina vienu elementu
struct 1 = struct 2 //pieliidzina visus elementus
& (bitwise and)
<< (bitshift left)
>> (bitshift right)
^ (bitwise xor)
| (bitwise or)
~ (bitwise not)
int a = 5; // binary: 0000000000000101
int b = a << 3; // binary: 0000000000101000, or 40 in decimal
int c = b >> 3; // binary: 0000000000000101, or back to 5 like we started with
1 << 0 == 1
1 << 1 == 2
1 << 2 == 4
1 << 3 == 8
int x = -16; // binary: 1111111111110000
int y = x >> 3; // binary: 1111111111111110
int y = (unsigned int)x >> 3; // binary: 0001111111111110
void print(char* C){
int i=0; //var bez
while(*(C+i)!= '/0'){ //var vnk C++
printf("%c",C[i]);
i++;//var C++
}
printf("/n");
}
int main(){
char C[20] = "Hello";
print(C);
}
107. rinda #include <Servo.h>
Servo STAB_SERVO;
Servo WING_SERVO;
Servo RUDD_SERVO;
Servo HOOK_SERVO;
/* MK edit - izveidojam poiteru matricu uz klasēm "ptr_Servo", kura glabajas objektu adreses */
Servo* ptr_Servo[] = [ &STAB_SERVO, &WING_SERVO, &RUDD_SERVO, &HOOK_SERVO ];
203. rinda void toParameters( uint8_t gID, uint8_t pID, float value ){
switch(gID){
case 1:
Parameters.FLY_TIME[pID] = value;
/* MK edit - darbina servo */
if ( pID > 4) ptr_Servo[PID]->write(value);
break;
case 2:
Parameters.CIR[pID] = (uint8_t)value;
break;